Setting brownout fuses off, external crystal with slow startup, no bootloader:
avrdude -c usbasp -pm328p -B 1000 -U lfuse:w:0xff:m -U hfuse:w:0xd9:m -U efuse:w:0xff:m
Setting brownout fuses off, external crystal with slow startup, no bootloader:
avrdude -c usbasp -pm328p -B 1000 -U lfuse:w:0xff:m -U hfuse:w:0xd9:m -U efuse:w:0xff:m
Install toolchain using this brew recipe: https://github.com/miyaki/homebrew-misc/blob/master/gcc-arm-embedded.rb
Got this kind of messages:
“HardFault_Handler’ referenced in section.isr_vector’ of obj/main/NAZE/startup
stm32f10x_md_gcc.o: defined in discarded section .text’ of obj/main/NAZE/main. o (symbol from plugin) SysTick_Handler’ referenced in section .isr_vector’ of obj/main/NAZE/startup_s tm32f10x_md_gcc.o: defined in discarded section.text’ of obj/main/NAZE/drivers
/system.o (symbol from plugin)”
This helped me and got it linking:
https://github.com/cleanflight/cleanflight/issues/107#issuecomment-60536855

– start with manual mode
– count 1 on first gps hit, and 2 on the second gps hit and so on..
– end on 7th count on gps mode.
– be quick
show [net] – for example “show gnd” -> visualizes all nets connected to net, fantastic at board view
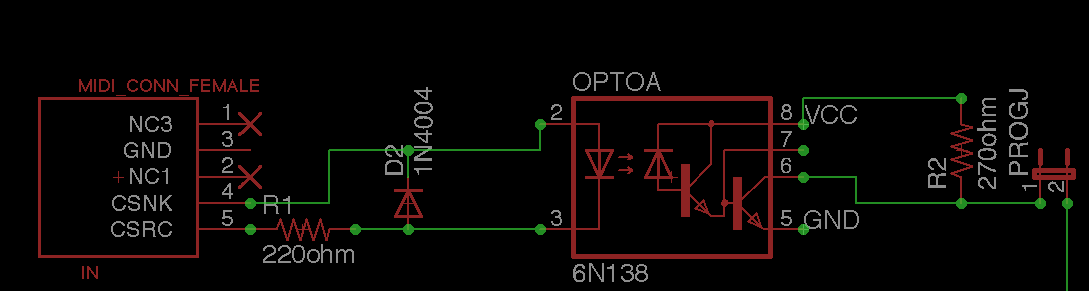
This is my MIDI in schematic, tested and working:
Measured from PO-12:
Width: 60mm
Height: 105mm (without the tab)
Thickness from batteries to top of potentiometers: 29mm
Display width: 52mm
Potentiometers are 10mm diameter
Just backupping from here.
Servo/Motor pin-layout (USB facing left, pins on the right):
– Empty
– Empty
– Motor 3 (left)
– Motor 2 (right)
– Motor 1 (tail motor)
– Second servo, not used
– Tricopter yaw servo (most bottom)
Orientation of the board can be changed by CLI command:
set align_board_yaw = 90
To reverse the yaw servo, type CLI command:
set yaw_direction = -1
Remember to type “save” and press enter.