| CLI parameter name | default value in 3.4 | |
| gyro_hardware_lpf | NORMAL | Filter at the gyro (hardware). Previously called “gyro_lpf”. Choices are NORMAL / ADVANCED. NORMAL = Filter starts from ~250Hz at 8kHz. EXPERIMENTAL=… More info |
| gyro_32khz_hardware_lpf | NORMAL | — |
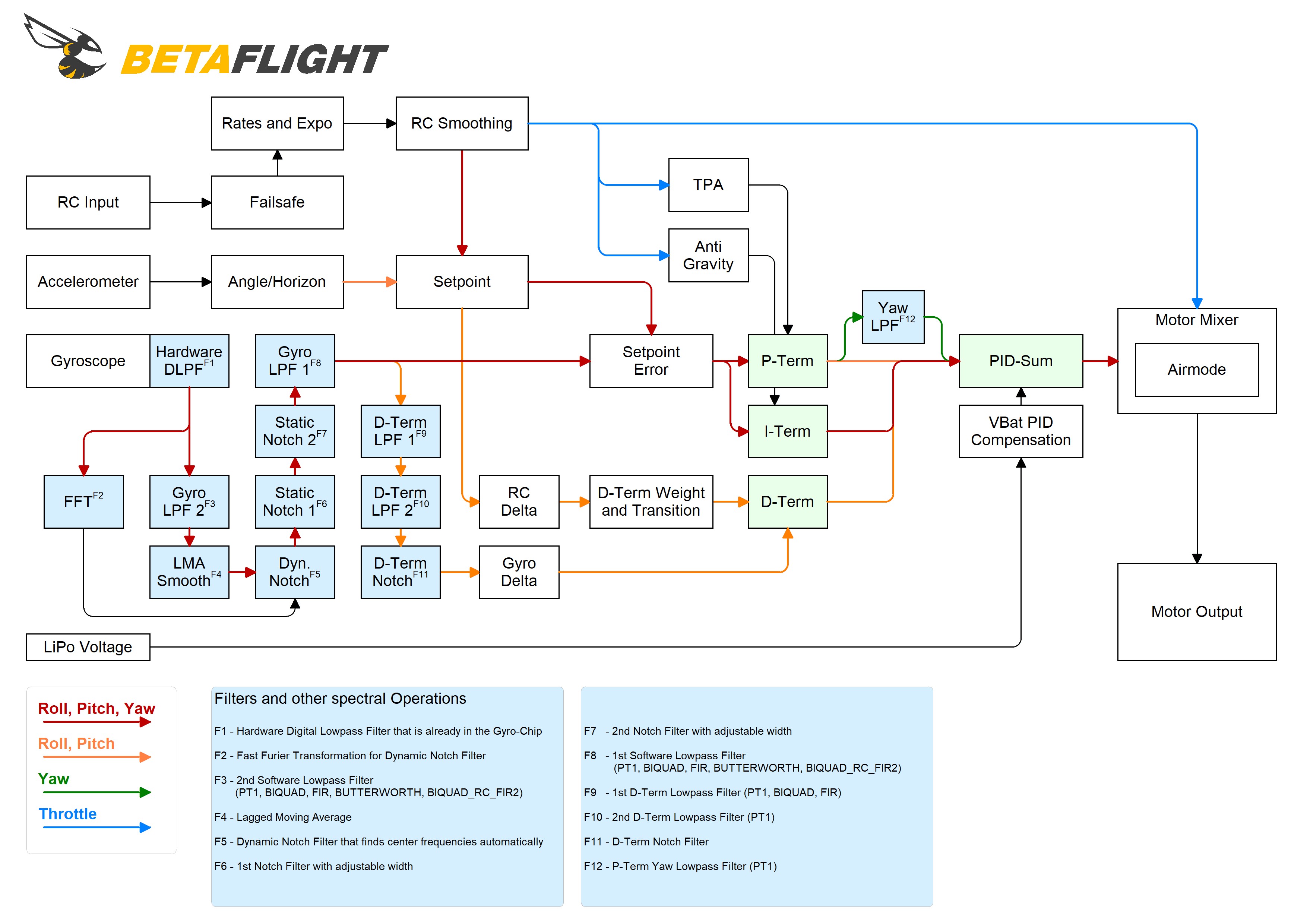
| gyro_lowpass_hz | 90 | aka “Gyro lowpass 1”. Last in the signal chain for PID (P/I terms, D has filters/notches).Suggested values for gyro_lowpass_hz: Default / Optimal flight performance: 100, Slightly noisy setup: 80, Very noisy: 50Can be replaced with gyro_lowpass2_hz (with BIQUAD_RC_FIR2 type) |
| gyro_lowpass_type | PT1 | Choices:PT1, BIQUAD, BUTTERWORTH, BIQUAD_RC_FIR2, FAST_KALMAN |
| gyro_lowpass_order | 1 | — |
| gyro_lowpass2_type | PT1 | Lowpass 2 is right after hardware filter in the signal chain. |
| gyro_lowpass2_hz | 0 | — |
| gyro_lowpass2_order | 1 | — |
| gyro_notch1_hz | 400 | Suggested to disable |
| gyro_notch1_cutoff | 300 | — |
| gyro_notch2_hz | 200 | Suggested to disable |
| gyro_notch2_cutoff | 100 | — |
| dterm_lowpass_type | BIQUAD | Suggested to change to PT1 if used. Lowpass 1 is feeding signal to dterm chain.Note: profile specific |
| dterm_lowpass_hz | 100 | “Dterm lowpass is always needed. Never remove that! Even on the cleanest setup.” Note: profile specific |
| dterm_lowpass2_hz | 0 | “Modelling and logging shows significant reductions in higher frequency Dterm noise with only minor additional delay. Having a configurable setpoint allows the user to tune the least filtering that provides adequate noise reduction.The biquad will provide very effective filtering but greater delay.”More info
Note: profile specific |
| dterm_notch_hz | 260 | Can be disabled on clean setups. Note: profile specific |
| dterm_notch_cutoff | 160 | Note: profile specific |