show [net] – for example “show gnd” -> visualizes all nets connected to net, fantastic at board view
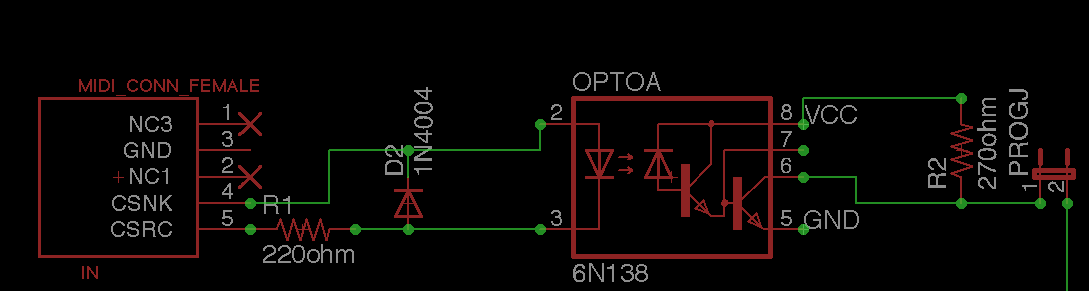
MIDI input reference design
This is my MIDI in schematic, tested and working:
Teenage Engineering PO-12 dimensions
Measured from PO-12:
Width: 60mm
Height: 105mm (without the tab)
Thickness from batteries to top of potentiometers: 29mm
Display width: 52mm
Potentiometers are 10mm diameter
Arduino connector positions
- PWMH 1×8 @ (1300,2000) ← X is not 1290 as before!
- PWML 1×8 @ (2150,2000)
- COMMUNICATION 1×8 @ (3050,2000)
- JP1 2×8 @ (3750,1550)
- JP2 2×8 @ (3750,750)
- POWER 1×6 @ (1550,100)
- ADCL 1×8 @ (2350,100)
- ADCH 1×8 @ (3250,100)
- ICSP 2×3 @ (2555,1100) ← +5 X offset
- Reset switch @ (2920,1100) ← -30 X offset
Just backupping from here.
Eagle PCB-Gcode plugin setting files location
On my OS X machine the files that PCB-gcode ULP uses are located here:
/Applications/EAGLE-7.0.0/ulp/pcb-gcode/settings
I had to edit these files manually because the plugin didn’t want to save the settings when edited at the GUI (it defaulted all values).
Naze32 Tricopter tips & tricks
Servo/Motor pin-layout (USB facing left, pins on the right):
– Empty
– Empty
– Motor 3 (left)
– Motor 2 (right)
– Motor 1 (tail motor)
– Second servo, not used
– Tricopter yaw servo (most bottom)
Orientation of the board can be changed by CLI command:
set align_board_yaw = 90
To reverse the yaw servo, type CLI command:
set yaw_direction = -1
Remember to type “save” and press enter.
Servo connector dimensions / size
Servo connector (“female”) dimensions are 7.85mm x 2.42mm for JR-style (without the “notch”).
Male servo connector (with the pins inside connector) outside dimensions are 9.17mm x 4.08mm.
Midi NRPN explained
Buzzled how NRPN commands work at midi?
For example Analog Four sends oscillator 1 tune/finetune in following manner (raw midi bytes), all values are decimal:
[packet on 3 bytes:] 184 99 1
[packet on 3 bytes:] 184 98 0
[packet on 3 bytes:] 184 6 38
[packet on 3 bytes:] 184 38 64
As you can see we got four CC commands in a row. This is a screenshot from Analog Four manual:
![]()
The value 184 is CC command for midi channel 9. Then follows the command. There are four different commands:
99 – describe the MSB “register”
98 – describe the LBS “register”
6 – set MSB value
38 – set LSB value
So the actual values are after the bytes 6 and 38 in LSB + MSB format.
See also http://en.wikipedia.org/wiki/NRPN
Novation Launchpad USB descriptors
Device descriptor:
Descriptor Length: 12
Descriptor type: 01
USB version: 0100
Device class: FF
Device Subclass: 00
Device Protocol: FF
Max.packet size: 08
Vendor ID: 1235
Product ID: 000E
Revision ID: 0002
Mfg.string index: 01
Prod.string index: 02
Serial number index: 00
Number of conf.: 01
Configuration descriptor:
Total length: 0020
Num.intf: 01
Conf.value: 01
Conf.string: 00
Attr.: 80
Max.pwr: D7
Interface descriptor:
Intf.number: 00
Alt.: 00
Endpoints: 02
Intf. Class: FF
Intf. Subclass: 00
Intf. Protocol: 00
Intf.string: 00
Endpoint descriptor:
Endpoint address: 81
Attr.: 03
Max.pkt size: 0008
Polling interval: 0A
Endpoint descriptor:
Endpoint address: 02
Attr.: 03
Max.pkt size: 0008
Polling interval: 0A
My tricopter dimensions
Just about to dump my well served tricopter, I remembered to write the measurements here:
Front motors: 44cm
Back motor 38cm from boom
Body plate: front 13cm, back 10cm, lenght 25cm
Arms 15mm x 15mm
Here’s the beauty with motors and ESC’s stripped away:
